在2017年發布的自動駕駛安全技術報告中,谷歌旗下自動駕駛公司Waymo系統性地闡述了其核心技術支柱——自動識別技術的開發路徑、核心構成與安全理念。這份報告不僅是對其技術能力的展示,更是對整個行業安全標準與責任的一次深刻探討。自動識別技術,作為自動駕駛車輛的“眼睛”與“大腦”感知部分的核心,其可靠性直接決定了系統的安全上限。
Waymo的自動識別技術是一個復雜的多傳感器融合系統,旨在實現對車輛周圍360度、遠距離、高精度的環境感知。其開發核心圍繞以下幾個層面展開:
1. 多模態傳感器套件的協同感知
Waymo并未依賴單一傳感器,而是構建了包括激光雷達(LiDAR)、毫米波雷達、攝像頭和超聲波傳感器在內的冗余套件。每種傳感器都有其獨特的優勢與適用場景:高分辨率激光雷達生成精細的3D點云圖,精確描繪物體的形狀與距離;攝像頭提供豐富的色彩與紋理信息,用于識別交通信號燈、標志及路面標線;毫米波雷達則在惡劣天氣(如雨、霧)中表現穩定,擅長探測移動物體的速度。開發的重點在于硬件性能提升(如定制化激光雷達擁有更遠的探測距離和分辨率)與深度融合算法,確保在不同光照、天氣和復雜路況下,系統都能獲得可靠、一致的感知數據。
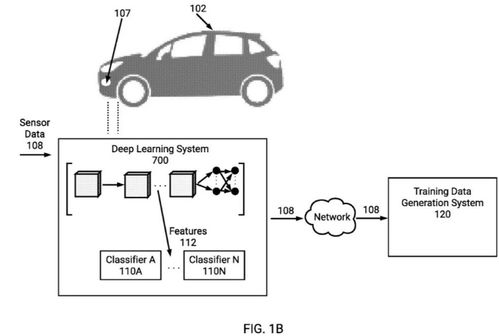
2. 基于深度學習的物體識別與分類
海量的感知數據需要強大的“大腦”進行解析。Waymo投入巨資開發了基于深度神經網絡(DNN)的識別算法。這些算法經過數百萬英里真實道路和數十億英里模擬里程的訓練,能夠實時、準確地識別并分類各種道路使用者:從車輛、行人、騎行者到寵物、雜物,甚至預測他們的行為意圖(如行人是否要橫穿馬路)。報告強調,識別技術不僅要知道“那里有什么”,更要理解“它接下來可能會做什么”。這是實現安全導航和防御性駕駛策略的基礎。
3. 高精地圖與實時感知的融合定位
Waymo為其運營區域制作了厘米級精度的高清地圖,包含車道線、交通標志、路緣石等靜態環境的詳細信息。自動識別系統將實時傳感器數據與高清地圖進行比對,實現超越GPS的精準定位(厘米級)。這好比為車輛提供了一個“記憶中的完美世界”作為參考基準,使得車輛能夠更準確地理解自身在車道中的精確位置,并提前預知前方的道路幾何形狀,即使在傳感器暫時受遮擋時也能保持穩定的定位。
4. 持續學習與仿真測試的閉環開發
技術的開發并非一蹴而就。Waymo建立了一個龐大的“持續學習與改進”系統。每一段真實路測數據,尤其是遇到的“邊緣案例”(如不遵守交規的行為、罕見天氣、特殊物體),都會被記錄并用于重新訓練和優化識別模型。更重要的是,Waymo構建了規模龐大的模擬仿真平臺,可以在虛擬世界中以千倍、萬倍于現實的速度,反復測試和驗證識別系統在無數極端場景下的表現,從而在技術部署前就將潛在風險降至最低。
安全至上的開發哲學
貫穿整個報告的核心是“安全第一”的理念。自動識別技術的每一個環節——從硬件冗余設計、軟件算法魯棒性到數據驗證流程——都以實現“失效可操作”為目標。即當某個傳感器或算法模塊出現異常時,系統能通過冗余配置和交叉驗證及時發現,并降級到仍能安全運行的狀態。
Waymo 2017年報告中所展現的自動識別技術開發,是一個集尖端硬件、先進人工智能、海量數據與嚴謹安全工程于一體的系統性工程。它不僅是當時Waymo技術領先地位的體現,也為整個行業如何構建可靠、安全的感知系統樹立了一個清晰的標桿,標志著自動駕駛技術從概念驗證向安全可靠的產品化階段邁出了堅實的一步。